

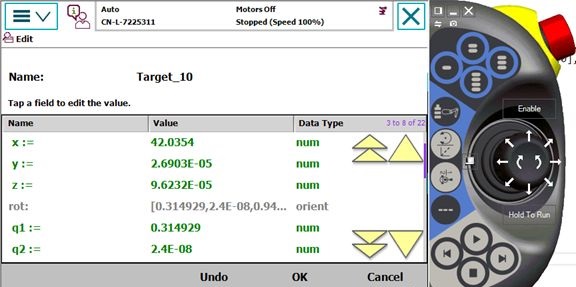
5)执行后,可以查看对应点位数据,发生变化

上图为在wobj0下
上图为workobject_1下
了解更多ABB机器人
文章来源网络,如有侵权请联系删除

 新闻分类 新闻分类
站内搜索 友情链接
|
新闻中心 机器人点位批量在不同坐标系下的转化——ABB机器人
发布时间:2023-03-08 浏览次数:53 返回列表
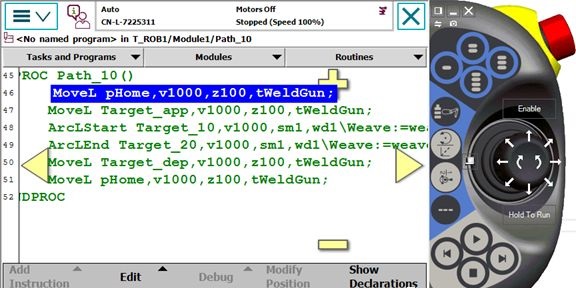
1)建程序的时候,所有点均在wobj0坐标系下(wobj0坐标系也可不写),如下图
5)执行后,可以查看对应点位数据,发生变化
上图为在wobj0下
上图为workobject_1下
了解更多ABB机器人
文章来源网络,如有侵权请联系删除 |