|
设为主页
|
保存桌面
|
手机版
|
二维码
4
3
ABB机器人代理——点焊集成
ABB机器人|ABB机器人集成|ABB机器人工作站|ABB机器人配件|ABB机器人培训|ABB机器人...
网站首页
品牌故事
供应产品
采购清单
新闻中心
荣誉资质
人才招聘
联系方式
网站相册
友情链接
新闻分类
暂无分类
站内搜索
供应产品
采购清单
新闻中心
人才招聘
网站相册
友情链接
暂无链接
您当前的位置:
首页
»
新闻中心
» ABB机器人50056关节碰撞报警处理
新闻中心
ABB机器人50056关节碰撞报警处理
发布时间:2023-04-18 浏览次数:1264
返回列表
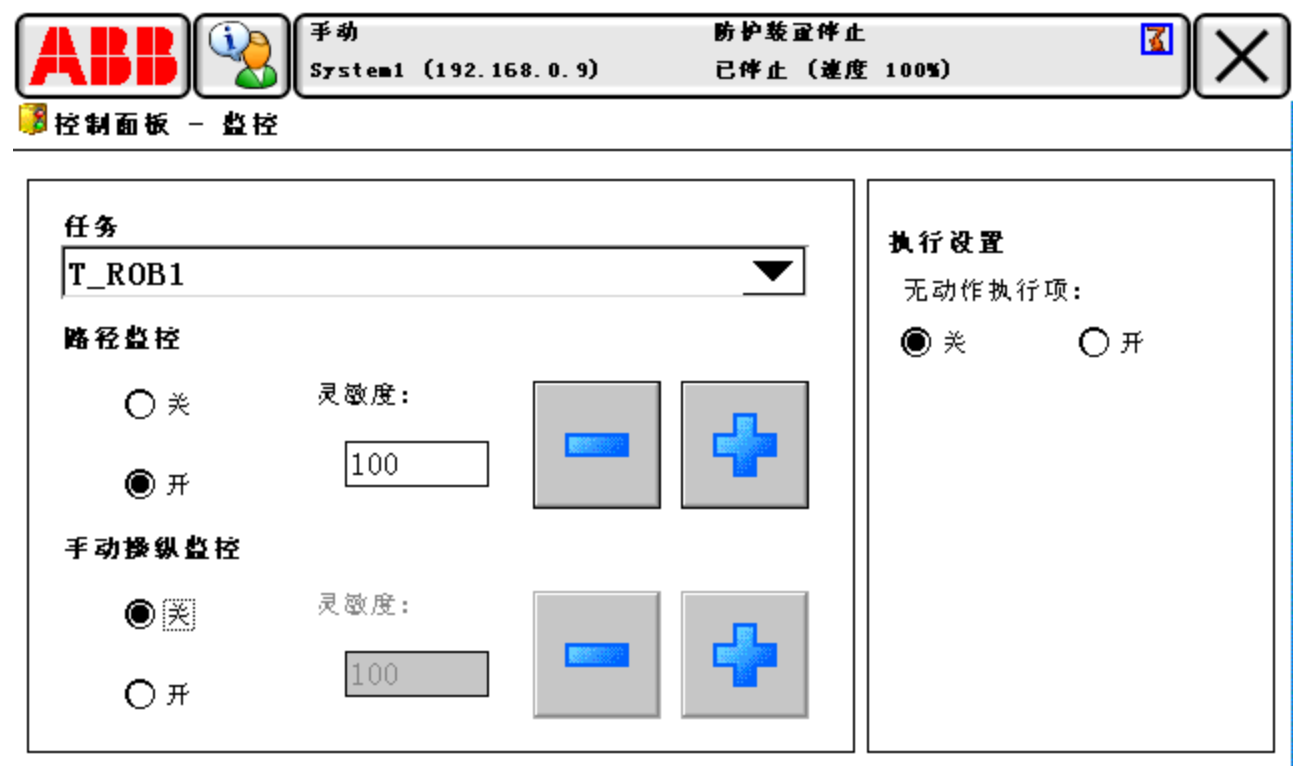
示教器进入控制面板,点击监控
关闭手动操纵监控
4.如果机器人未发生碰撞,依旧报这个错误,怀疑电机抱闸未打开
5.检查接触器版附近的K44,以及K42 k43上的报闸控制线是否通
(线号如下图)
了解更多
ABB机器人
文章来源网络,如有侵权请联系删除
©2026 ABB机器人代理——点焊集成 版权所有 技术支持:
工博士机器人网
访问量:68376
网站首页
管理入口





 新闻分类友情链接
新闻分类友情链接